
Ezt a cikket a Telex és az autóMAGAZIN együttműködésének keretében olvashatják.
Sokan szeretik, mások viszont ki nem állhatják a távolságtartó tempomatot, amely az embernél lényegesen gyorsabban képes fékezéssel megelőzni a ráfutásos baleseteket, és tavaly óta minden Európai Unióban forgalmazott új autó kötelező extrája. Az autóMAGAZIN és az Auto Motor und Sport az MdynamiX AG-val együttműködve öt tipikus közlekedési helyzetben vizsgálta meg néhány autótípus követőradaros rendszerének viselkedését.
Egyes adaptív sebességtartó automatikák a beállítástól függetlenül nagy távolságokat tartanak az előttük haladó járműhöz képest. A rendszer legügyesebb viselkedésének és a legjobb összehasonlíthatóságnak meghatározására a próba során minden esetben a lehető legkisebb követési távolságot állítottuk be, ami rögtön szembesített egy dilemmával. Néhány tesztautó rövid ideig olyan közel kerülhet az előtte haladóhoz, ami már nem felelt meg a KRESZ előírásainak. Hogy ezt elkerüljük, minden vizsgált modellben beállíthatunk nagyobb követési távolságokat is, ami nemcsak biztonságosabb és szabályosabb, de nyugodtabb vezetést is tesz lehetővé.
Négy autó, többféle műszaki megoldás
Az összehasonlításhoz egy elektromos hajtású Nio ET5 Touringot, egy Tesla Model Y-t és egy Volvo EX30-at, valamint egy dízelmotoros Mercedes E 220 d T-t választottuk. A biztonság úttörői, a Mercedes és a Volvo nagy hatótávolságú radarrendszerekre támaszkodnak, valamint a lökhárítók sarkaiban elhelyezett, több üzemmódú radarokkal mérik a távolságot a többi járműtől. Kevésbé elterjedt megoldás a Nióé, ami elöl három, hátul két milliméteres hullámhosszúságú radart, továbbá egy elöl, középen egy LiDAR-rendszert (Light Detection and Ranging) alkalmaz. Ezt lézerradarnak is nevezik, hiszen lézersugarakkal határozza meg a távolságot. Az autók többségében számos kamera is része a rendszernek, a Tesla Vision kizárólag ezekre támaszkodik. A Model Y összesen nyolc kamerával figyeli a környezetét, ezek közül három (nagy látószögű, teleobjektív, főmező) néz előre.


A tesztelésben együttműködő cég kifejezetten ilyen rendszerekkel kapcsolatos vizsgálatokat végez autóipari ügyfelei számára. A mérnökök két autót szereltek fel azonos méréstechnikai eszközökkel, amelyek tetejére két antenna került. Az egyik a mérőautók közötti vezeték nélküli rádiókapcsolathoz (WLAN), egy másik pedig a műholdas helymeghatározáshoz. Az azonos útvonalon végzett és többször megismételt próbák során pontosan rögzítették a vizsgált járművek sebességét, térbeli helyzetét, a gyorsulását, illetve a tesztautók közötti távolságot. Az oldaltávolságokat szintén felhasználták a kiértékeléshez, hiszen ezek például a sávváltáskor szükséges reakcióidő méréséhez fontosak.
Jobb sáv: útban lévő autó
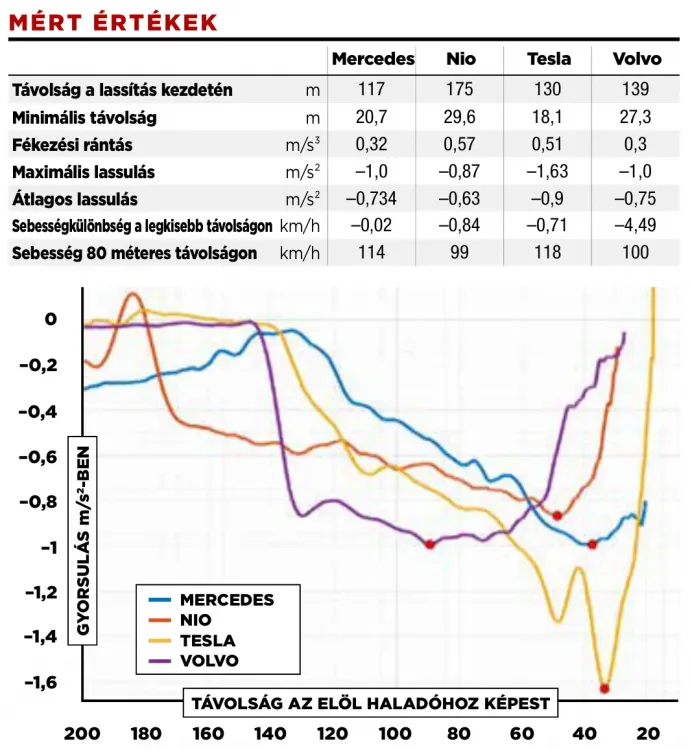
A jobb oldali sávban haladunk 130 km/óra sebességgel. Az autók távolságtartó automatikája a legrövidebb követési távolságra van állítva, és az összeset komfort vezetési módba kapcsoltuk. Utolérünk egy 80 km/órával haladó járművet. A jobb oldali sávban maradunk amíg a sebességek kiegyenlítődnek, miközben mérjük a tesztautók fékezési stratégiáit. Mi történik?
A Nio ET5 már 175 méteres távolságnál lassítani kezd. Ez elég korai beavatkozás, és 80 méteres követési távolságig körülbelül 30 km/órával csökkenti a sebességet. Ugyanez vonatkozik a Volvo EX30-ra is, amely egy kicsit több időt ad a feltételezett előzésre sebességveszteség nélkül, mivel legalább 36 méterrel később kezd fékezni. A Mercedes E-osztály és a Tesla Y sokkal gyakorlatiasabb. Az előbbi 117 méteres követési távolságnál csökkenti a sebességet, majd folyamatosan növeli a fékerőt. A Model Y egy kicsit korábban kezd lassítani, majd a végén a legerősebben fékez, de követési távolságon belül így is gyorsabban halad végig, mint a többi autó.
Összességében a Teslában is biztonságban érezzük magunkat, de a manőver során elég közel kerül az előtte haladóhoz. Ugyanez igaz a Mercedesre is, amely a legkisebb követési távolságnál lényegesen erőteljesebben lassít, mint a többiek. Hirtelen fékerőváltozások? Nem volt rá példa, de az első közlekedési helyzetben nem is volt rá szükség.
Balról bevágnak elénk
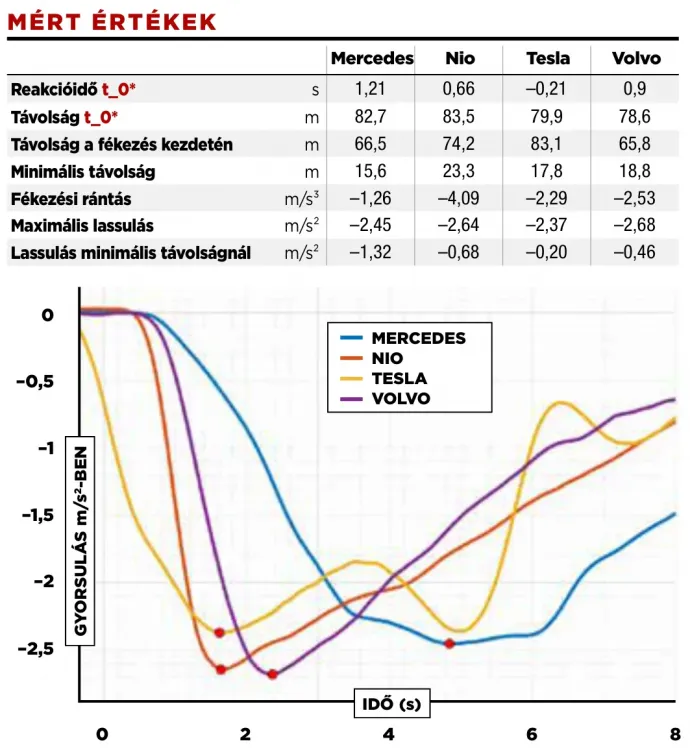
130 km/h sebességgel haladunk a belső sávon, amikor előttünk 80 méterre egy 80 km/óra sebességgel haladó jármű hirtelen, jelzés nélkül bevág a mi sávunkba. Ezúttal az összes tesztautó sokkal erőteljesebben lassít, átlagosan az 1,1 m/s² helyett 2,5 m/s² gyorsulással. Ez nem jelent rendellenességet, hiszen a teljes sebességtartományú adaptív sebességtartó automatikákra vonatkozó ISO-szabványban legfeljebb 3,5 m/s²-es lassítás engedélyezett.
A legerősebb fékezés a Nióban érezhető, de a többi járműben is elég erős ahhoz, hogy a rendszer egyértelmű közbelépését felismerjük. Ebben a tesztben is az ET5 tartja a legnagyobb, 23,3 méteres minimális követési távolságot, ami a többi autóban átmenetileg ennél jóval rövidebb. Ennek ellenére a biztonságérzet mindegyikben jó, ami többek között a lassulási görbékkel magyarázható. Bár a Mercedes 15,6 méteren belülre kerül az előtte haladóhoz képest, a fékezéskor tapasztalható rántás elég erős, a távolság pedig nő, így nincs ok az aggodalomra.
A Model Y már azelőtt fékez, mielőtt a sávot váltó autó elé vágna, ezért az értéke negatív. Ez a megelőző reakció valószínűleg azzal magyarázható, hogy a rendszer kizárólag videókamerák képeire hagyatkozik. A megoldás hátránya, hogy nincs más érzékelő, ami megerősíthetné az érzékelést, így nincs lehetőség hitelesítésre.
Tipikus előzés
Egy jármű után haladunk a jobb sávban állandó 80 km/óra sebességgel, miközben a sebességtartó automatika 130 km/órára van állítva. Irányjelzést adunk, kihúzódunk mögüle, és hagyjuk, hogy az elektronika gyorsítson.
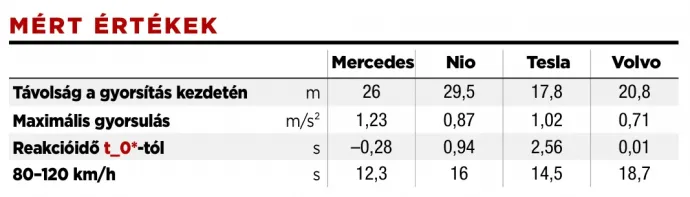
Ezt a feladatot csak a Mercedes végzi félig-meddig úgy, ahogy az ember tenné, hiszen a sávváltás közben csak a gép gyorsít, méghozzá 1,23 m/s²-tel (ISO-szabvány maximum 2 m/s²-t engedélyez). Emellett egyértelműen a leggyorsabban éri el a 120 km/órát, de az általunk tesztelt Distronic komfort üzemmódban még így is túlságosan tétovának találtuk. Gyakorlatiasabban gyorsul, mint a többiek, mert azok olyan lassan építik fel a sebességet, hogy az a biztonságérzetünket rontja, elvégre az előzéshez használt sávba húzódtunk be átmenetileg, mögöttünk pedig jön a forgalom.
Tapasztalatból tudjuk, hogy egyes autók határozottabban lépnek a gázra ebben a manőverben, de az erős gyorsulás, amit nem tudunk magunk befolyásolni hamar kellemetlenné válik. Tesztalanyaink nem így viselkedtek, sőt, de sok autóban van rá mód, hogy ilyenkor gázt adva felülbíráljuk az elektronikát, majd elérve a kellő sebességet ismét rábízzuk magunkat, anélkül, hogy a tempomatot ehhez először ki, majd újra be kellene kapcsolni.
A bal oldali sáv szabaddá válik
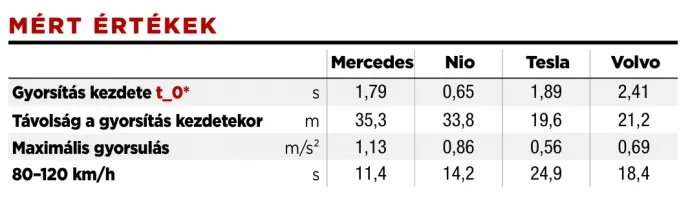
A beállított sebesség ismét 130 km/óra, de előttünk egy autó halad 80 km/h sebességgel, majd egy bizonyos ponton jobbra lehúzódik, és így szabaddá válik az út előttünk. Az egész tesztmezőny álomszuszék: minden rendszer megvárja, amíg a sáv teljesen szabaddá válik. A Volvo csak 2,41 másodperccel azután kezd gyorsítani, hogy az előttünk haladó autó teljesen lehúzódott.
A Nio késlekedik a legrövidebb ideig, de a többi közlekedőt így is irritálja, mivel 34 méteres követési távolság ellenére mindössze 0,861 m/s² sebességgel gyorsít ‒ vagyis túlságosan lassan. A Tesla megint elég hamar felismeri a helyzetet, de szintén nagyon komótosan gyorsít, és 24,9 másodperc kell neki a 120 km/óra sebesség eléréséhez, ami alig különbözik a többi tesztautóétól. És a Merci? Az éri el a leggyorsabban a 120-at, de szintén 1,79 másodpercet vár, mielőtt felépítené a sebességet, amikor a pálya már szabad. Ha a gyorsulást csak az elektronikára bízzuk, akkor csökkentett biztonságérzettel kell együtt élnünk. Adjunk inkább mi magunk egy kis gázt, és akkor minden rendben lesz!
Megállás és elindulás
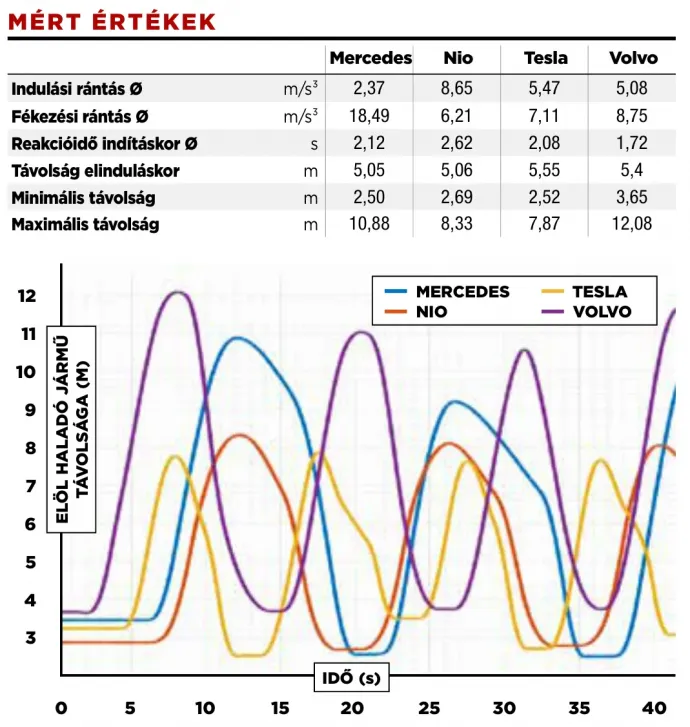
Elindulunk, gyorsítunk egy rövid ideig, majd megállunk. Indulás, rövid araszolás, megállás. Elindulás, araszolás, megállás ‒ és így tovább. Természetes, hogy sok járművezető szívesen átadná ezt a feladatot a szoftvereknek. Elvileg ez lehetséges is, de tesztjárműveinkkel ez még távolról sem működik kielégítő módon.
Ezt mutatja az alábbi diagram is. A Mercedes és a Volvo 10 méter fölé engedi a távolságokat ‒ maximum 12 km/óra sebesség mellett. A következmény? A szomszédos sávokból bevágnak a hatalmas résbe, és ezzel egyre hátrébb sorolnak minket. A Nio és a Tesla a maga nyolc méterével alig ügyesebb. Miért van ez így? Azért, mert álló helyzetben egy autóhossznyi távolságot tartanak a rendszerek, majd amikor az elöl haladó autó elindul, a tesztautók békésen várnak még körülbelül két másodpercet mielőtt megindulnának.
A Mercedes mással is kiérdemel némi kritikát. Még akkor is inkább magunk vezetnénk, ha jobban működne ebben a helyzetben. Miért? A maga 18,49 m/s3 körüli rántásával olyan durván áll meg, mintha mindig megijedne. A tesztelt stop-and-go rendszerek tehát legfeljebb dugóban, egysávos forgalomban használhatók, egyébként inkább terhet, mint könnyebbséget jelentenek a vezető számára.
Összefoglalás
A tesztautók egyike sem kezeli a mindennapi gyakorlatnak megfelelően a megállás utáni elindulás helyzetét, és előzéskor mindegyik többé-kevésbé a vezető beavatkozására hagyatkozik. Ennek is megvannak az előnyei, hiszen egyik sem ijesztget erős gyorsítással. A fontos fékezési próbákon mind a négy autó legalább tisztességes biztonságérzetet nyújt. Ezt a Mercedes a legjobb stratégiával kombinálja ahhoz, hogy tartani tudjuk a forgalom ritmusát. A Tesla nagyjából tartja ezzel a lépést, de az ET5 és az EX30 nem, amelyek az első próbán túl korán vagy túl erősen fékeztek.
